
¡Hola!. ¡Sed todos bienvenidos!. ¡Pasad, pasad! ¡Qué alegría volver a veros!. La verdad es que llevo mucho tiempo sin abrir este pequeño refugio para vosotros... ¡Pero habéis vuelto!. Id pasando al fondo. En la nevera hay cervezas y refrescos.
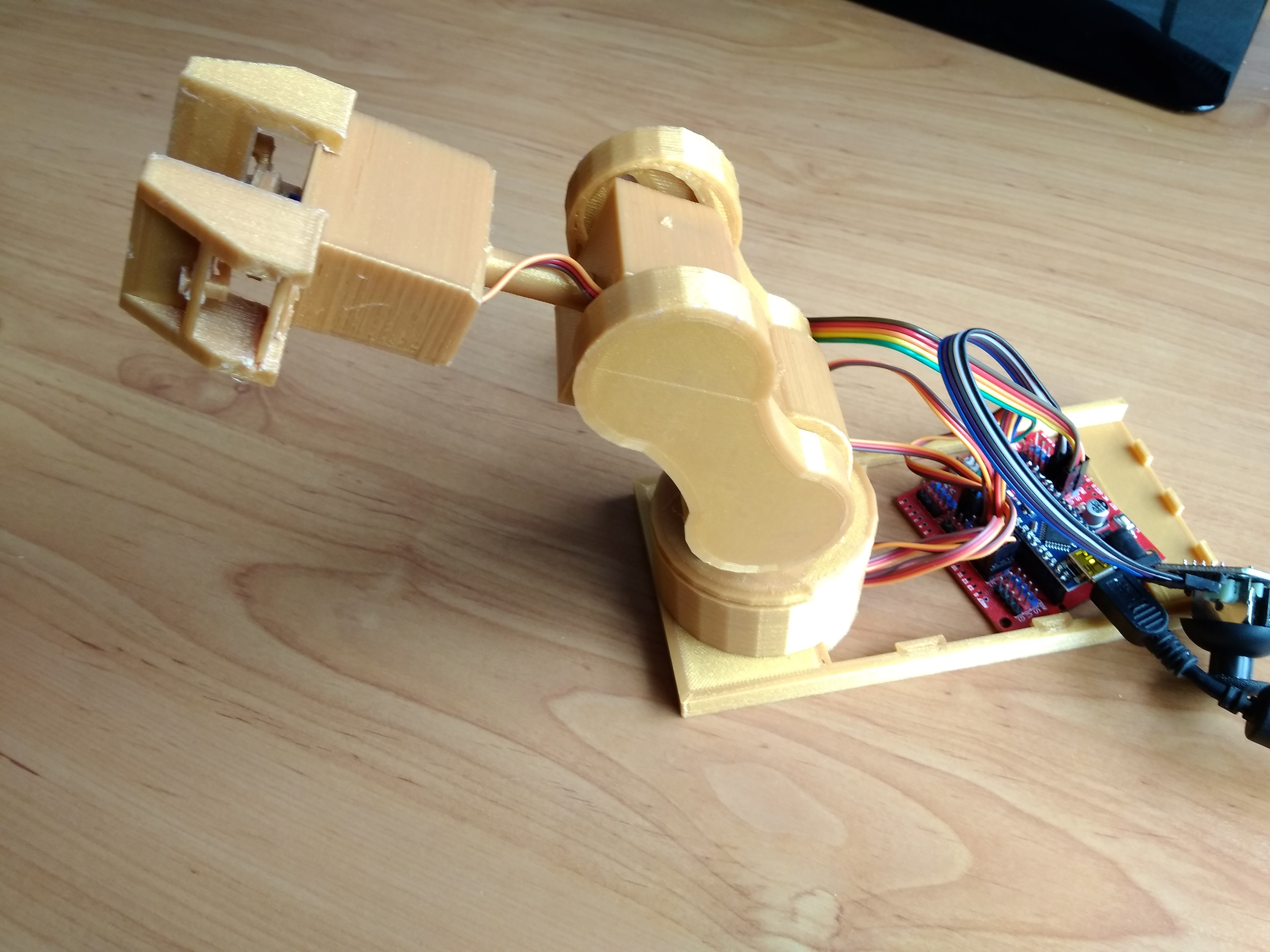
Hoy vamos a empezar a documentar un proyecto con el que ya he trabajado algunas veces, pero del que no hay información alguna. Se trata de Pedro Robot, un brazo robótico imprimible en 3D que tiene muchísimas posibilidades en cualquier Taller de Tecnología. Según la información (poca) que dejan en la página de Thingiverse a la que aludo en el anterior link, es un brazo robótico de bajo coste, con cuatro grados de libertad, diseñado en Francia. Pedro Robot es compatible con Arduino, es (relativamente) sencillo de montar, pide muy poca electrónica (lo más complicado serían los servos, y pueden usarse nuestros queridísimos SG90) y puede utilizarse a muchos niveles en un instituto o escuela de Educación Primaria.
Hay también una página en hackaday con el proyecto, pero en realidad no aporta mucha más información al respecto. Así que, después de haber montado ya unos tres robots de este modelo, me he decidido a documentar (en la medida de lo que pueda) el proceso de montaje y programación de este estupendo brazo robótico. Hoy vamos a empezar montando lo que me ha dado más problemas: la pinza. De ahí el título de este humilde artículo. Vamos, efectivamente, a empezar la casa por el tejado.
Read more: Montaje de un Pedro Robot (I): empezando la casa por el tejado.
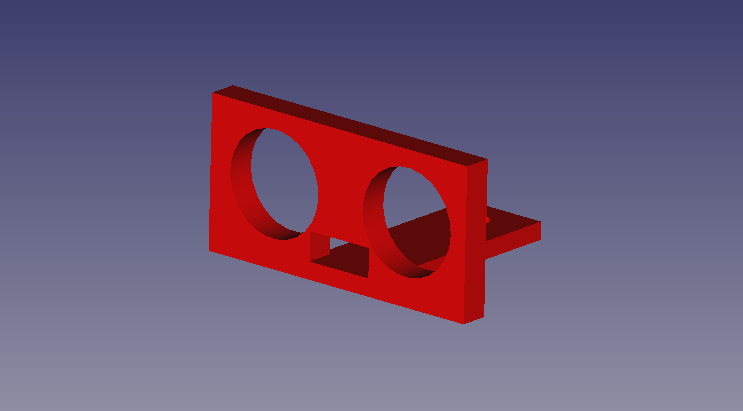
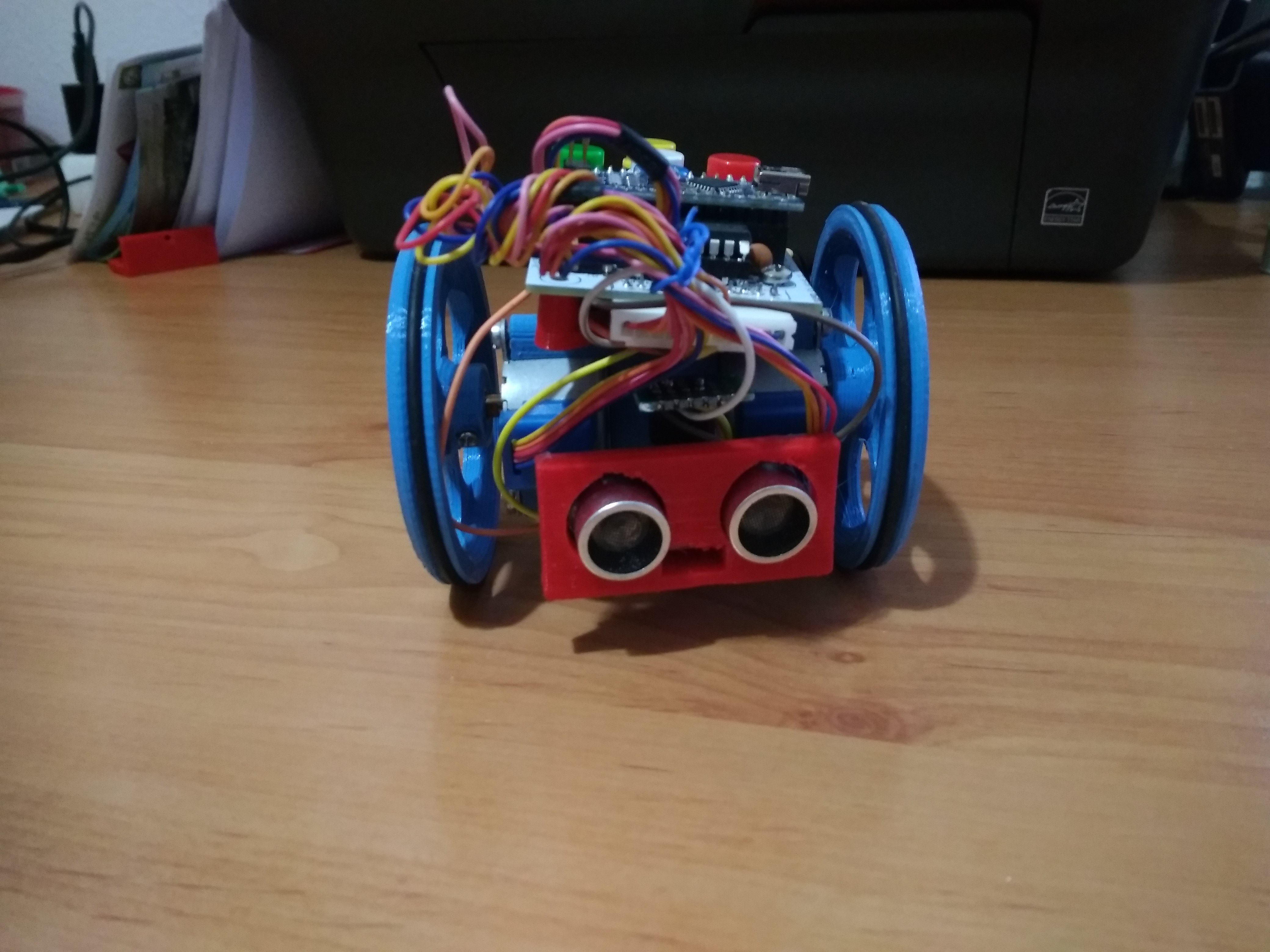
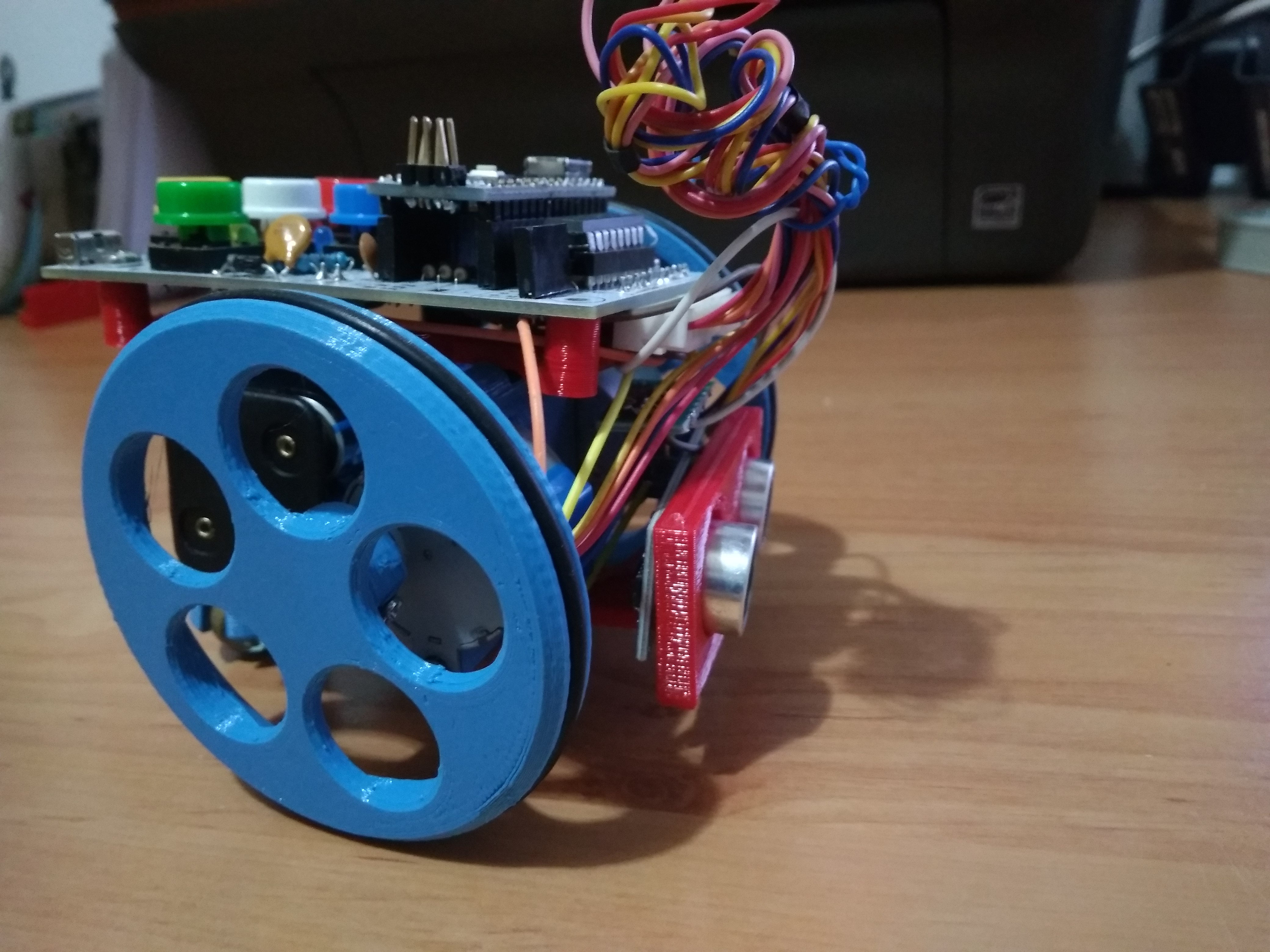
¡Saludos, estudiantes!. Hoy comenzamos la semana dejando en esta humilde web nuestra propuesta de soporte para el sensor de ultrasonidos (el HCSR-04, pero sería válido para otros como el PARALLAX) que puede acoplarse a nuestro queridísimo escornabot de Bricolabs para su programación con MBlock.
- Descarga aquí el soporte para el HCSR-04 en FreeCAD (para modificarlo a tu gusto)
- Descarga aquí el soporte para el HCSR-04 en STL (para imprimir directamente)
Espero que os resulte de utilidad. En un futuro lo modificaré para que se ajuste mejor mediante tornillo al motorBracket del robotillo.
 |
 |
|
Eso es todo por ahora. ¡Nos vemos otro día!. ¡Sed felices!. ¡Siempre creciendo!. ¡Siempre aprendiendo!. ¡Cultura maker!

Para los que me conocéis, sabéis que siempre estoy dispuesto a pasar un ratito con los más jóvenes para llevarles algo con lo que aprender, jugar y trasterar si está relacionado con la cultura maker. En esta ocasión, los amigos de Serendipia y Zona84 me facilitan el acceso a uno de los espacios de ManchaCómic 2018, aquí, en Ciudad Real, para que mis alumnos de 4º de Robótica en el IES Maestro Juan de Ávila hagan de monitores con niños de entre 3 y 14 años en diversas actividades relacionadas con la Robótica, la Impresión 3D y la Realidad Aumentada (esto último con Scratch; a ver qué nos sale, que es la primera vez).
Para más información, aquí os dejo el enlace al artículo de ManchaCómic. Los que penséis acudir con vuestros niños, aquí podéis apuntarlos. Abajo tenéis también el callejero para los que no seáis de la zona y penséis venir. ¡Nos vemos allí!
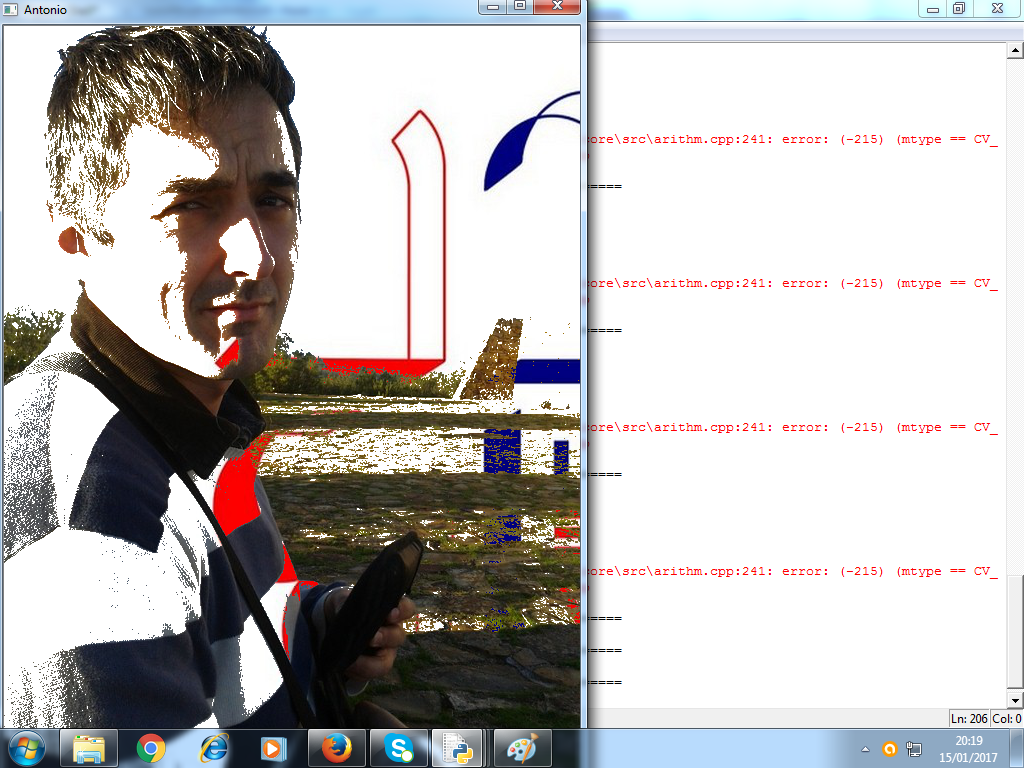
¡Saludos, estudiantes!. Hace un par de artículos explicábamos cómo podíamos coger una imagen, tratarla de un modo determinado (aplicando un filtro, en nuestro ejemplo de luminosidad), para a continuación tratar el resultado como una máscara que combinábamos con dos imágenes: en una, recortábamos la imagen siguiendo dicha máscara como patrón; en otra, recortábamos siguiendo el inverso de dicha máscara, de modo que ambas imágenes se superpusieran, complementándose de modo perfecto; éste era el resultado de nuestro ejemplo:
Bueno, pues llevamos ya unos cuatro artículos dedicados a explorar las posibilidades de Open CV, todos ellos con la perspectiva de acabar programando un robot que responda de modo inteligente a una imagen registrada por una webcam. Sin embargo, aún no hemos acometido una fase muy importante de nuestro aprendizaje, y es el modo en que nuestro ordenador (o nuestra Raspberry, o donde sea que estemos ejecutando nuestro programa en Python) interactuará con Arduino. Para ello, necesitaremos utilizar la librería PySerial:
https://pythonhosted.org/pyserial/
Como en otras ocasiones, ya te digo que nosotros estamos trabajando en Windows, con Python 2.7, y que la instalación de librerías no entra en el objetivo de estos artículos. Los más avezados ya sabéis que un
python -m pip install pyserial
os sacará del apuro. Si no sabéis cómo hacerlo, también podéis consultar directamente el readme.rst del github donde se aloja todo el software: https://github.com/pyserial/pyserial
Y si no, pues como siempre, a bucear y buscar información por la red.
Read more: Robótica y Open CV: Brazo robótico que me hace la cobra (III): controlando la Arduino